Overview
The logistics industry faces a 46% annual employee turnover rate, while current Autonomous Mobile Robot (AMR) forklifts cost 4–5× more than manual forklifts and struggle in dynamic “brownfield” environments.
RetroLifts provides a low-cost, non-invasive retrofit kit that enables scalable automation of existing electric forklifts. Instead of replacing fleets, we retrofit them with infrastructure-based perception and teleoperated autonomy — enabling gradual adoption and reduced capital expenditure.
Primary benefits:
- Low Cost – No need to purchase entirely new AMRs
- Scalable – Incremental fleet upgrades
- Robust – Infrastructure-based perception avoids common AMR failures
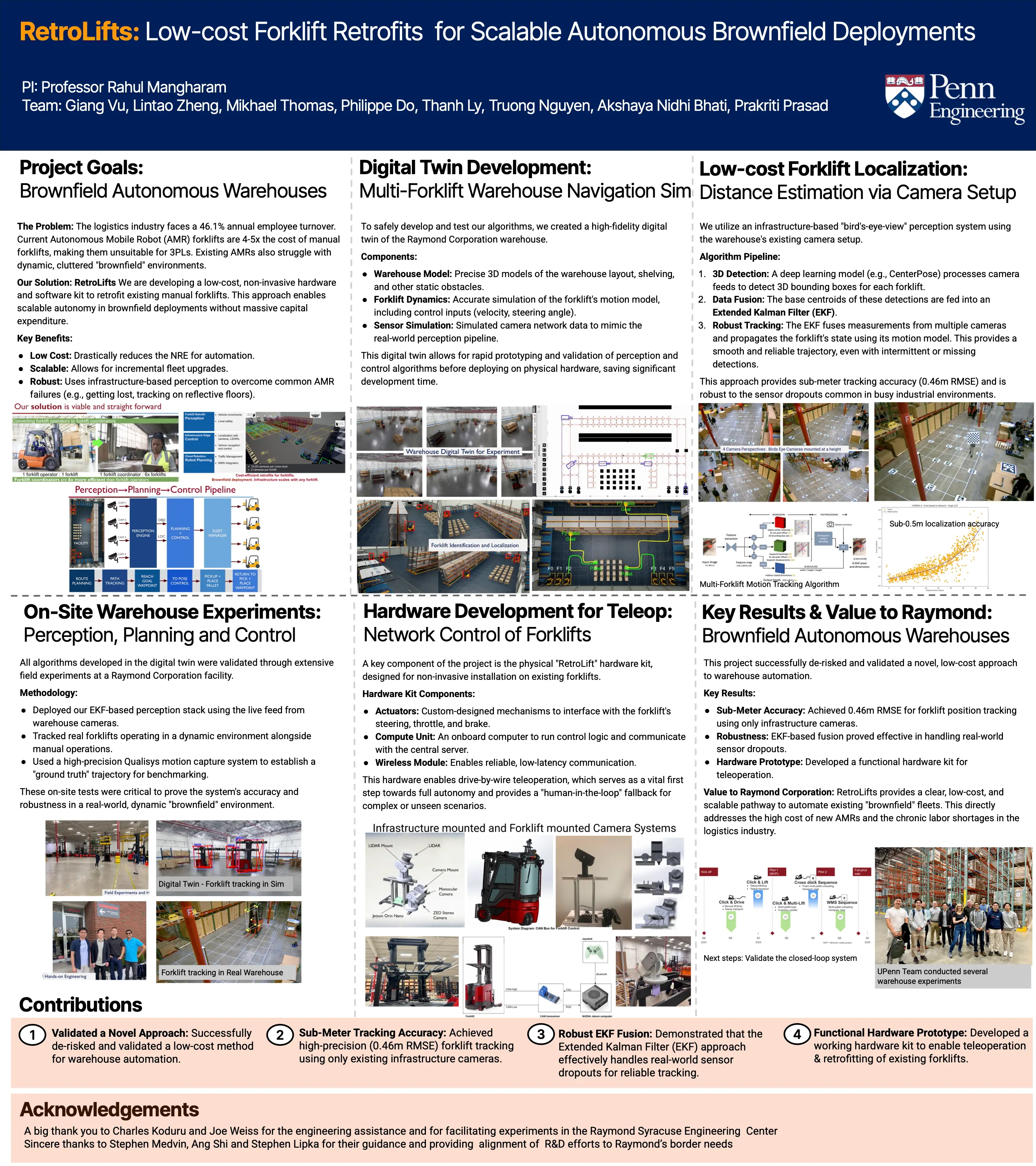
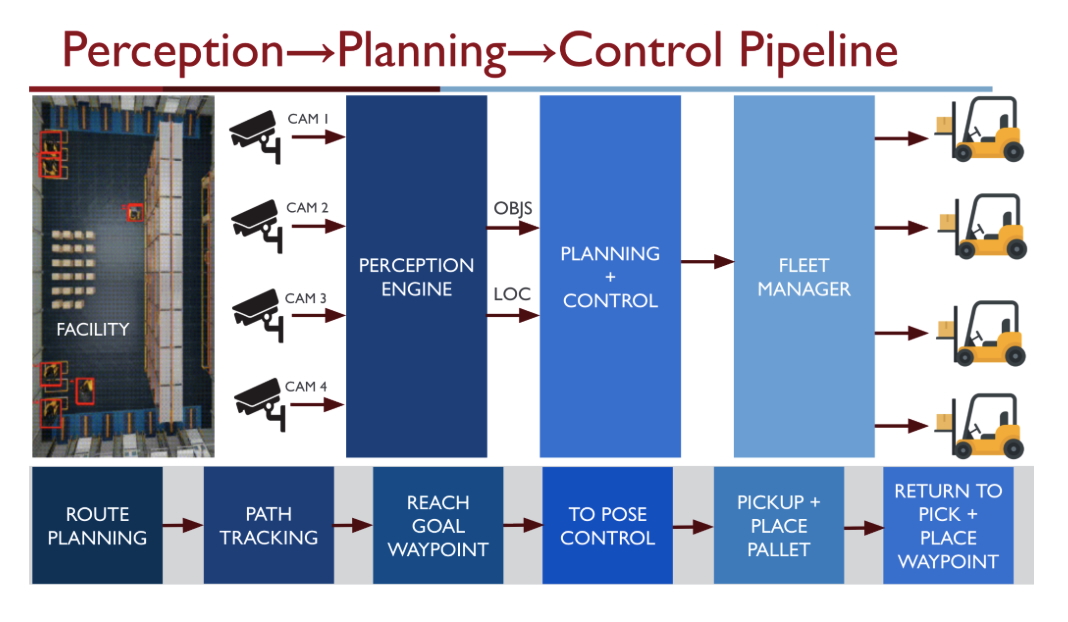
System Architecture
RetroLifts integrates three components:
1. Forklift Retrofit (Perception + Teleop Hardware)
- Drive-by-wire teleoperation
- Onboard compute unit
- Wireless low-latency communication
- Custom actuator interface for steering, throttle, brake
2. Infrastructure Edge (Bird’s-Eye Perception)
- Facility-mounted camera network
- 3D detection of forklifts
- Multi-camera fusion via Extended Kalman Filter (EKF)
- Sub-meter localization accuracy
3. Cloud Robotics (Fleet Planning)
- Global route planning
- Multi-agent navigation
- Fleet management and WMS integration
This collaborative perception–planning–control pipeline enables multiple forklifts to operate concurrently.
Digital Twin Development
To safely develop and validate the system, we built high-fidelity digital twin environments representing Raymond facilities and other warehouse configurations.
Components:
- Accurate 3D warehouse model
- Forklift dynamics simulation
- Camera sensor simulation
- Multi-forklift navigation testing
The digital twin enabled rapid prototyping and sim-to-real transfer before physical deployment.
Infrastructure-Based Localization
We implemented a bird’s-eye-view localization system using a multi-camera setup in the warehouse.
Algorithm Pipeline:
- 3D detection for forklift bounding boxes
- Multi-camera data fusion
- Extended Kalman Filter (EKF) state estimation
Result:
Sub-meter tracking accuracy with 0.46 m RMSE, robust to real-world sensor dropouts.
On-Site Warehouse Validation
All algorithms were validated through field experiments at a Raymond Corporation facility.
Methodology:
- Live warehouse camera feeds
- Real forklifts operating under varied lighting and environmental conditions
- Qualisys motion capture ground-truth benchmarking
These experiments demonstrated robustness in dynamic brownfield environments.
Hardware Development
A non-invasive hardware kit was developed for teleoperation:
- Custom actuator mechanisms
- Onboard compute unit
- Wireless communication module
This enables:
- Automatic teleoperation
- Manual fallback
- Gradual adoption across fleets
Key Results
- Validated Low-Cost Brownfield Automation Strategy
- 0.46 m RMSE Sub-Meter Tracking Accuracy
- Robust EKF Fusion Under Sensor Dropouts
- Functional Teleoperation Hardware Prototype
- Fleet-Level Coordination and Planning Demonstrated in Digital Twin
RetroLifts provides a scalable pathway to automate existing fleets without replacing infrastructure.
Contributors
PI: Professor Rahul Mangharam
Giang Vu, Lintao Zheng, Mikhael Thomas, Philippe Do, Thanh Ly, Truong Nguyen, Akshaya Nidhi Bhati, Prakriti Prasad
Acknowledgements
A big thank you to the Raymond Corporation team for engineering assistance and facilitating warehouse experiments.

