Overview
Most perception algorithms are run-to-completion, operate independently of the control subsystem and dominate the energy footprint of autonomous systems. To achieve safe long-term autonomy, it is essential to have energy-efficient on-board operations by co-designing perception and control algorithms. In this effort, my team designed a variety of Robust Anytime Model Predictive Controllers that instruct the perception pipeline how long to run based on what quality of estimate is needed, thus saving computation energy when a low-quality estimate suffices (say, an autonomous car driving on an empty road), and cranking up the computation when a high-quality estimate is needed quickly, e.g., in a near-miss. Anytime AV architectures have been demonstrated to outperform regular MPC and significantly reduced energy consumption on drones running visual odometry for perception.
Co-design of Anytime Computation
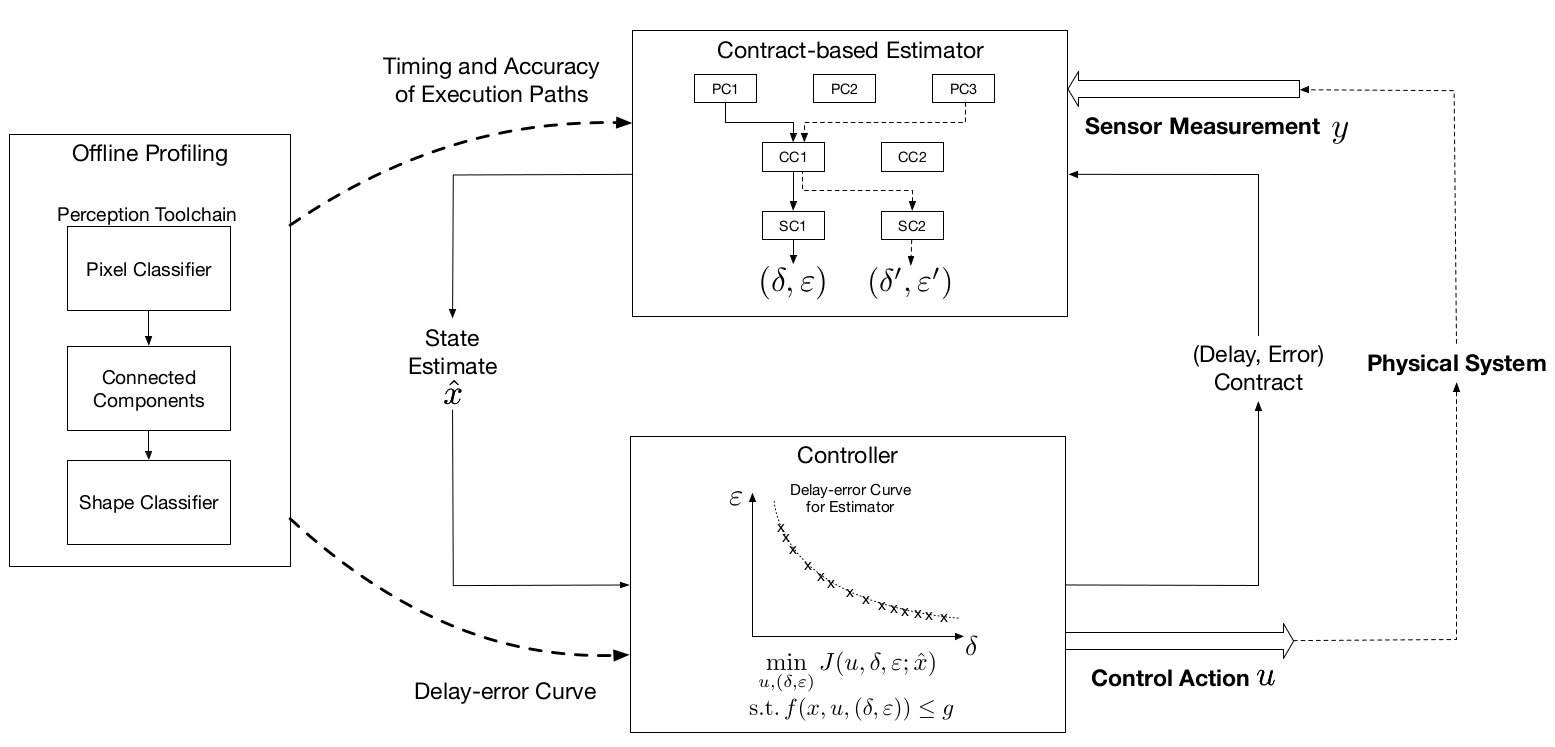
Perception-based state estimation for autonomous system is generally a computationally expensive process, both in terms of execution time and energy consumption on the computation platform. This work develops a contract-driven framework for closed-loop interplay between: a) a predictive control algorithm and b) a flexible anytime perception-based state estimator to trade-off computation time (and energy) for estimation accuracy while guaranteeing robust (or chance-constrained) constraint satisfaction of the autonomous system. Experimental results show the benefit of this framework over approaches that do not leverage this co-design.
Publications
-
Anytime Computation and Control for Autonomous Systems
Pant, Abbas, Mohta, Quaye, Nghiem, Devietti, Mangharam
IEEE Transactions on Control Systems Technology, 2020. -
Robust Model Predictive Control for Non-Linear Systems with Input and State Constraints via Feedback Linearization
Pant, Abbas, Mangharam
IEEE Conference on Decision and Control (CDC), 2016. -
Co-design of Anytime Computation and Robust Control
Pant, Abbas, Mohta, Nghiem, Devietti, Mangharam
Real-Time Systems Symposium (RTSS), 2015. -
Power-efficient Algorithms for Autonomous Navigation
Pant, Abbas, Nischal, Kelkar, Kumar, Devietti, Mangharam
International Conference on Computer Science and Engineering (ICCSE), 2015.
Contributors
Pant, Abbas, Nischal, Kelkar, Kumar, Devietti, Mangharam, Quaye
Citation
@ARTICLE{9051687,
author={Pant, Yash Vardhan and Abbas, Houssam and Mohta, Kartik and Quaye, Rhudii A. and Nghiem, Truong X. and Devietti, Joseph and Mangharam, Rahul},
journal={IEEE Transactions on Control Systems Technology},
title={Anytime Computation and Control for Autonomous Systems},
year={2021},
volume={29},
number={2},
pages={768-779},
keywords={Delays;Contracts;Prediction algorithms;Estimation error;Autonomous systems;Real-time systems;Adaptive systems;autonomous systems;computer vision (CV);predictive control;robust control},
doi={10.1109/TCST.2020.2979388}}

