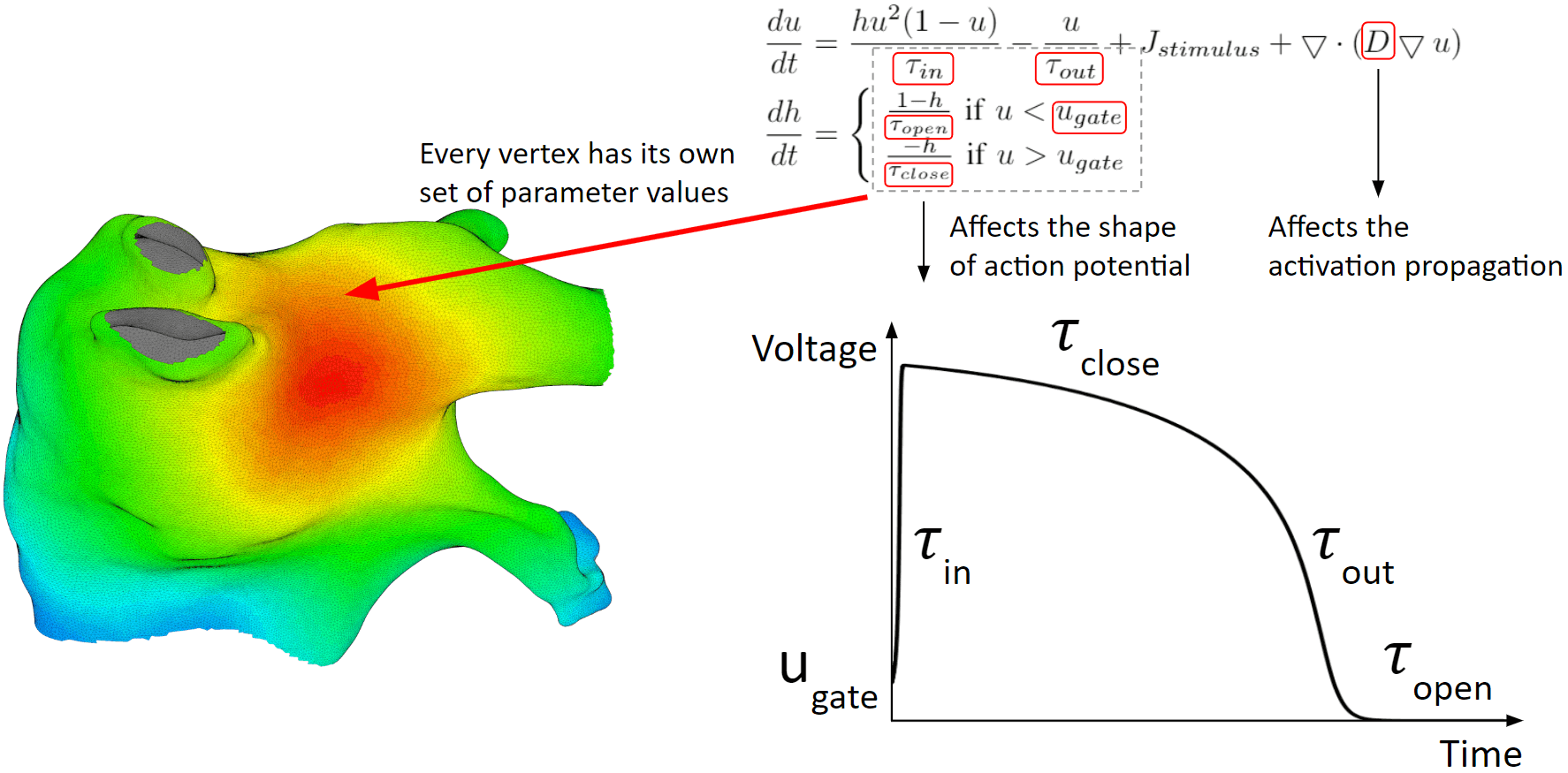
Patient-specific Heart Modeling for Arrhythmia Ablation
Process of patient-specific heart modeling is: extract patient data to tune heart model parameters, next, initiate arrhythmia (the heart's initial state is also extracted from patient data), then solve the heart model equations to simulate patient-specific arrhythmias.